
The system created in the video includes a large mass (the "Base") that is attached to a spring-damper that allows translational motion in the vertical Y-direction, with an attached small pendulum mass (the "Bob") that has rotational motion about the out-of-plane Z-axis, centered at the mass center of the Base. The mass matrix and forcing vector derived in MOMDYN is below.
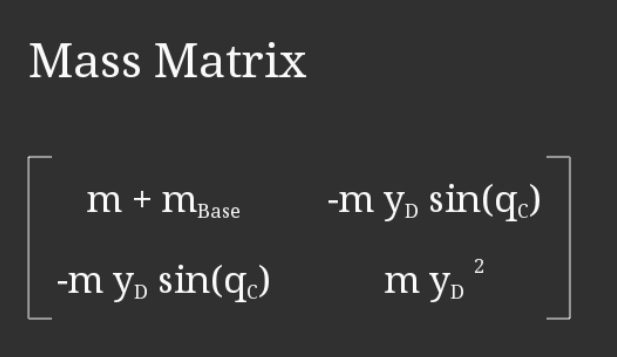

The mass matrix will multiply by a vector containing the derivatives w.r.t. time of the generalized speeds, (s_A, s_C), so the pair of equations of motion are:
(m+m_{Base}) s_A' - m y_D sin(q_C) s_C' = -c_A s_A - k_A (-e_A + q_A) + m y_D s_C^2 cos (q_C) + 500 y_B sin(10 t) / sqrt(y_B^2)
-m y_D sin(q_C) s_A' + m y_D^2 s_C' = -c_C s_C - k_C q_C
In the first equation, we'll note that m_{Base} >> m, so we'll assume it is effectively zero, and we'll replace the sum of m + m_{Base} with M. Also, the vector component y_B is exactly 1 in our scenario, and we can replace the generalized speed s_A with q_A', and replace the force magnitude and frequency with F and ω. Thus, we can reduce and rearrange the first equation to a simple mass-spring-damper equation
M q_A'' + c_A q_A' + k_A (q_A - e_A) = F sin(ω t) ,
where the steady-state response is
... = A sin (ω t)
We can also rearrange the second equation to give
m y_D^2 q_C'' + c_C q_C' + k_c q_C = m y_D sin(q_C) q_A'' .
No comments:
Post a Comment